Un virtuose de la micromécanique
André Guignard, l’horloger inventeur de la souris hémisphérique, maillon coloré de l’épopée humain-machine
Par Anne-Sylvie Weinmann, avocate et data scientist, sur la base de propos recueillis le 17/08/2021 lors d’un long entretien.
Horlogerie, radio et électricité: «La clé, c’est l’outil!»

Horloger ou régent?
Passionné de musique qui écoutait adolescent du jazz sur une installation stéréophonique construite par lui-même, entouré de frères et sœurs pianistes et violonistes, André Guignard exprimera sa virtuosité loin des gammes, dans le domaine de la micromécanique. Il entrera dans ce vaste univers de la petite mécanique de précision par la prestigieuse porte de l’horlogerie. Rien d’étonnant me direz-vous pour un enfant de L’Orient né en 1942 dans une famille d’horlogers de la Vallée de Joux. Dans les années 1950-60, les choix professionnels qui s’offrent à un jeune homme du berceau de la haute horlogerie demeurent limités: horloger ou régent. Régent? «C’est instituteur en vaudois» répond-t-il en riant. Il a un frère horloger et l’autre instituteur. CQFD! Si à l’évidence l’horlogerie a choisi André Guignard plus qu’il ne l’a choisie, le savoir et l’expertise acquis au cours de ses trois ans d’apprentissage se révèleront tout au long de sa carrière être d’une valeur inestimable. Tic, tac, tic, tac, le jeune apprenti a construit de ses mains une montre 17 lignes: «A l’époque on faisait entièrement une montre, de A à Z. 17 lignes; cela indique la dimension de la montre. Une ligne correspond environ à 2,3 mm». Reconnue chronomètre d’observatoire, certifiée officiellement dans sa précision de marche, la montre de poche d’André Guignard fonctionne toujours très bien!
Une passion: l’électronique au son de la musique
Mélomane mais non musicien, André Guignard écoutait beaucoup de musique à la radio ou enregistrée sur des disques vinyles. Le jeune combier apprenti horloger a une passion: la radio! Capter de la musique, des émissions. «Et surtout je faisais de la reproduction de musique avec les disques, c’étaient les tout débuts de la stéréophonie. J’étais un des premiers à avoir un système stéréophonique dans ma chambre. Avec des copains on écoutait les disques de jazz de l’époque, les premiers enregistrés en stéréophonie, Count Basie par exemple».
«J’avais fabriqué des amplificateurs à l’époque à tubes»; c’était son installation, il avait quasiment tout fabriqué lui-même au moyen des composants nécessaires que l’on trouvait aisément dans les magasins spécialisés: tubes, résistances, transformateurs, condensateurs. La radio n’avait plus de secret pour lui grâce à un livre dont le titre demeure gravé à tout jamais dans sa mémoire, ouvrage toujours disponible à ce jour dans sa 29e édition de 1998: La radio?… mais c’est très simple! d’Eugène Aisberg. «C’était génial!» s’enthousiasme-t-il encore, de ce livre fait dans le style d’un dialogue questions-réponses entre un ignorant et un savant qui fabriquaient un récepteur radio, avec des dessins un peu naïfs. «J’allais acheter de la tôle aluminium, je faisais les trous pour passer les socles des tubes électroniques, ensuite je câblais. Et enfin, l’amplificateur fonctionnait!». Un amplificateur de 30cm sur 30cm sur 15cm. Pas encore du domaine du micro, il fallait de la place pour dissiper la chaleur émise par les tubes. Les amplificateurs faisaient 6 watts de puissance maximum, mais «Je peux vous dire ça fonctionnait bien!».
Au-delà de la joie évidente, et contagieuse, qui émane d’André Guignard lorsqu’il évoque ses souvenirs teintés de technique, de musique et d’amitié, l’écouter c’est se pencher sur la naissance et la mise en place d’une technologie qui va transformer à jamais nos sociétés: le transistor. «On achetait avec un copain des vieilles radios, on les démontait, les remontait, on essayait de les faire fonctionner. Elles étaient évidement à tubes». Le tube à vide, composant électronique servant à contrôler et amplifier le courant électrique sera évincé plus tard par le révolutionnaire transistor, né à Noël 1947, regroupé en nombre toujours croissant dans des circuits-intégrés (puces, 1958) dont la plus célèbre est l’Intel 4004 (1971), 50 ans cette année, qui avec ses successeurs a rendu possible l’avènement et le développement de la micro-informatique, notamment les Smaky, aventure collective dans laquelle André Guignard sera engagé aux côtés de Jean-Daniel Nicoud, un des pères de la micro-informatique suisse. «Le transistor, les premières applications sont apparues dans les années 60. Ce n’était pas inintéressant mais on pensait que jamais on ne pourrait remplacer les tubes dans les applications de puissance. La technologie a évolué. Au début elle était pratiquement inutilisable. On trouvait que c’était intéressant d’avoir un transistor, d’avoir un système amplificateur mais on ne pouvait pas dépasser quelques milliwatts de puissance, la fréquence était très limitée, ça coûtait cher, jusqu’à ce qu’on se rende compte qu’on pouvait faire beaucoup d’autres choses. Et après c’est parti de manière exponentielle». C’est parti, le transistor a conquis le monde! Le jeune horloger fraîchement diplômé a poursuivi son chemin sur une route pavée de tubes et de transistors: d’abord une année de raccord à l’école des métiers comme radio-électricien. «On ne parlait pas d’électronique à l’époque. On parlait de radio. L’électronique était limitée à la radio», puis ce sera le Tech, l’école d’ingénieur, encore à Lausanne, couronné par un diplôme en électronique et électricité.
Trois formations qui s’enrichissent mutuellement. Dans ce bagage très complet d’horloger-ingénieur, se trouvent toutes les ressources nécessaires pour concevoir et réaliser moultes inventions. Et s’il manque un outil, pas de problème, André Guignard le fabrique. «Un horloger est capable de fabriquer un outil pour une seule opération. On fabriquait nos outils en suivant un programme préétabli. Nous avions ce qu’on appelle une layette avec des quantité de tiroirs remplis d’outils spécialisés pour fabriquer des montres. Aujourd’hui vraisemblablement cette exigence est un peu atténuée. Plus personne ne voudrait passer une journée entière à fabriquer un axe d’ancre de 0,5mm de diamètre et 1,5mm de long avec deux pivots à chaque bout, et qu’à la fin de la journée vous le perdez, passez une heure à le chercher dans les fentes du parquet. Je ne pense pas qu’il reste un apprenti horloger capable de tourner un axe de balancier et de polir les pivots à la main avec un archet. Et quand le pivot de balancier casse, vous ne l’entendez pas. Vous voyez qu’il n’est plus là. Et recommencez, des dizaines de fois».
De ces heures passées à l’école de la minutie, de la patience et de la persévérance, les méthodes de fabrication constituent les acquis qui serviront plus tard à André Guignard. Être à même de fabriquer un outillage spécialisé pour une opération lui a largement ouvert les champs des possibles car «quand vous concevez, que ce soit un robot complexe ou une petite pièce, vous la faite en fonction de vos possibilités». Selon ses possibilités, et selon son référentiel. «La micromécanique, c’est également les boîtes à musique de l’Auberson. A la limite de la micromécanique et de la mécanique de dimension plus élevée, on trouve la petite mécanique avec, par exemple, le génial Stefan Kudelski, que j’ai connu, et ses enregistreurs mécaniques Nagra». André Guignard, artisan du micro a également côtoyé la grosse mécanique, dont la Suisse était aussi spécialiste, à côté de l’horlogerie «championne toutes catégories!». Une visite enfant chez Sulzer, impressionné par un moteur de bateau de 15 mètres sur 25. Un mandat pour Alstom: des machines qui font 2,6 gigawatts. Les qualificatifs de cet univers sont bien différents de ceux de l’horlogerie: immense, gigantesque, énorme! Mais la différence entre ces mondes mécaniques se limite-t-elle à une question d’échelle? Non, elle est plus subtile, et se loge dans l’audace, ou la naïveté, des horlogers d’entant. «Il ne faut pas oublier qu’un mécanicien qui voit une montre l’analysera mécaniquement, et déclarera qu’à cause des frottements, il est impossible de la faire fonctionner ». Et pourtant, nous le savons, une montre ça marche! Alors, Monsieur Guignard, où se trouve la différence? «Et oui, ça marche! Les horlogers ne savaient pas que c’était impossible, c’est pour ça qu’ils l’ont fait! Il ne se posaient pas la question de savoir si c’était possible ou pas, ils y sont allés. Et ça marche parce qu’il ne faut pas calculer en frottements, il faut calculer en chocs. C’est pour cela que l’horlogerie est un monde à part dans le domaine de la micromécanique». N’est-ce pas la richesse et la combinaison de cette pluralité de regards qui ont permis à de nombreuses inventions d’éclore?
EPFL 1976: «J’aime bien mettre la main à la pâte et faire de la petite mécanique°»
Avant de rejoindre l’Ecole Polytechnique Fédérale de Lausanne (EPFL), André Guignard a travaillé dans le domaine de la téléphonie chez Standard Telephon & Radio AG. Employé au département Versterkerprüdel, ou contrôle des amplificateurs, de l’entreprise sise sur les bords du lac de Zurich, il quittera après deux ans ce travail de routine qui le conduisait aux quatre coins de la Suisse pour contrôler les appareils utilisés dans les centraux téléphoniques. C’est à Lausanne qu’il renoue avec l’horlogerie au sein de la maison Bernard Golay. «On était les premiers à fabriquer des montres à quartz». L’entreprise pionnière fera malheureusement faillite. L’horloger mélomane fonde alors avec d’anciens collègues la société CFG à Morges. CFG, acronyme de Cohen, Francfort, Guignard: «On avait commencé à faire des montres, car on ne savait faire que ça». L’entreprise existe toujours, ne fait plus de montres, et même si elle a conservé le G de ses origines, André Guignard ne lui est plus lié.
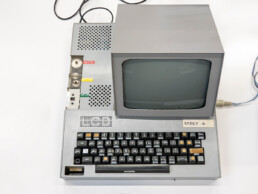
Morges, dernière escale avant de trouver son port d’attache en 1976 à l’EPFL, au Laboratoire des Calculatrices Digitales (LCD) dirigé par Jean-Daniel Nicoud. Quarante-cinq ans plus tard, c’est dans cet extraordinaire environnement, qui aura changé deux fois de nom, de responsable aussi, qu’André Guignard me reçoit. Lui est toujours là, même si depuis sa retraite en 2007, il n’assure plus qu’une présence à temps partiel. Il souligne l’importance d’un bon environnement de travail, trente ans pour construire son laboratoire, avoir tout le matériel nécessaire. Le matériel de base, de même que le matériel spécialisé. Un environnement façonné, enrichi au fil des projets et ses sous-projets. Il y a de tout dans cette caverne d’Ali Baba soigneusement rangée. La mécanique ancienne et les nouvelles technologies se côtoient, se complètent à l’instar des fraiseuses, du tour et des quatre imprimantes 3D: «On avait déjà la fraiseuse Aciera, elle a plus de 50 ans. Je l’utilise toujours de la même manière, elle est toujours aussi précise. Ça c’est de la mécanique suisse! La seconde Aciera, plus grosse et le tour Shaublin, des tours de haute précision fabriqués en Suisse, des machines irremplaçables». Pas d’obsolescence programmée! On en trouve d’occasion, mais elles ne sont plus fabriquées. «Les jeunes les regardent d’une façon un peu curieuse. Maintenant on dit: «Pourquoi des machines, on a des imprimantes 3D!», d’ailleurs j’en ai quatre ici sur lesquelles je peux faire certaines choses intéressantes mais contrairement à une croyance largement répandue, il y a des limites. Quand c’est très petit ça ne va pas, parce que la définition de ces imprimantes 3D reste relativement faible. On travaille dans l’ordre de 0,1 mm, un peu moins pour les très bonnes machines. Seulement, quand on fait de la mécanique de précision ce n’est pas 0,1 c’est 0,001mm, un millième de millimètre sur lequel on travaille! Avec mon tour, je domine le travail au centième de millimètre sans problème, ce qui est parfois indispensable pour faire des ajustements». Il y a des mondes que l’on peine à imaginer, à l’exemple du monde du micro. «Avec un imprimante 3D, on peut faire des pièces qu’on ne peut pas fabriquer mécaniquement; ces techniques se complètent parfaitement». Ecouter André Guignard parler de micromécanique, c’est regarder le monde à la loupe. Pour moi qui n’envisage que très rarement mon environnement en-dessous du millimètre, je prends conscience de cette dimension bien réelle du micro, je suis admirative d’un travail fait avec une telle aisance à une si petite échelle!
Du contenu des armoires qui l’entourent, remplies de vieux matériel et d’éléments liés à divers développements passés, André Guignard, relève: «Ce sont des archives qui ne sont pas des archives». Des archives vivantes. Il est en train de refaire un système de contrôle pour les gros générateurs d’Alstom, on le lui a redemandé après 10 ans. Il a tout. Et il refait. Sur sa table de travail, une bobine en cuivre qu’il refait. Incroyable! Tout est fabriqué à la main, c’est de l’artisanat, c’est magnifique! Quelle dextérité, quelle délicatesse! On n’est pas loin du travail de l’horloger. «Ce sont surtout les méthodes de l’horloger» précise-t-il «Un outillage adapté à ce qu’on veut refaire, c’est extrêmement important. La clé, c’est l’outil!». De sa formation d’horloger, choisie surtout par manque de choix, il ne nourrit aucun regret, bien au contraire: «En définitive, c’est probablement ce que j’utilise le plus!».

«J’aime bien mettre la main à la pâte et faire la petite mécanique», une affirmation qui a immédiatement séduit Jean-Daniel Nicoud, et marque le début d’une longue collaboration entre les deux hommes. André Guignard a mis sa vaste palette de compétences au service de projets variés, au bénéfice du LCD qui deviendra LAMI (Laboratoire de micro-informatique, 1980) puis LAP (Laboratoire d’architecture des processeurs, 2000 à la retraite de Jean-Daniel Nicoud, nouveau responsable professeur Paolo Ienne), et d’autres laboratoires de l’EPFL, de collègues chevronnés ou d’étudiants en quête de savoir, et d’un coup de pouce, d’entreprises externes, de projets durables ou éphémères: dans les domaines de la micro-informatique, de la logique électronique et de la robotique. André Guignard, à travers ses innombrables réalisations, est le témoin et l’acteur d’un monde en profonde mutation.
La souris hémisphérique: le maillon coloré du développement de l’interface humain-machine
L’histoire dans l’Histoire
«Je n’étais pas content des mécaniques précédentes, horloger de formation, je me suis dit qu’André Guignard pourrait me faire une souris fiable» se rappelle Jean-Daniel Nicoud au sujet de l’arrivée d’André Guignard au LCD. Et il avait raison! André Guignard a en effet conçu et fabriqué la souris hémisphérique qui est demeurée «le modèle de construction de toutes les souris mécaniques», complète l’enthousiaste professeur.
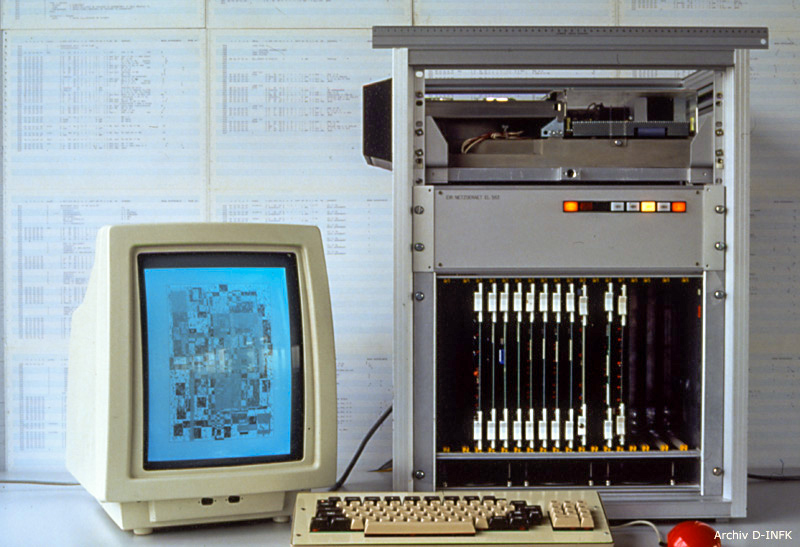
Profondément impressionné par la fameuse «Mother of all demos» donnée en décembre 1968 par Douglas Englebart, père de la souris, le pionnier vaudois de la micro-informatique avait pu obtenir les plans du révolutionnaire périphérique, le modifiera et l’améliorera, une première fois en 1974 en remplaçant les potentiomètres par des encodeurs optiques. La souris qui a encore des roues séparées, n’a toutefois plus besoin d’être soulevée. On comprend dès lors que celui qui croyait si fermement dans la souris comme moyen d’interaction entre l’humain et la machine, embarque rapidement André Guignard dans sa vision et lui dise: «Tu me feras une souris!». «La souris, c’était effectivement dans les premières choses que j’ai faites». Les nouveaux prototypes se suivent régulièrement au gré des idées, puis des commandes: les roues de la version originale échangées contre une balle de ping-pong, puis l’acier remplacera le plastique. Mais une souris n’est utile qu’avec un écran digne de ce nom, «l’écran était juste capable de faire du texte, on ne pouvait rien faire d’utile avec une souris à l’époque. Il fallait un écran graphique», précise l’inventeur des Smaky. L’objet tant attendu arrivera enfin au début des années 1980.
Dans notre pays, seul le laboratoire de Jean-Daniel Nicoud pensait à la souris.
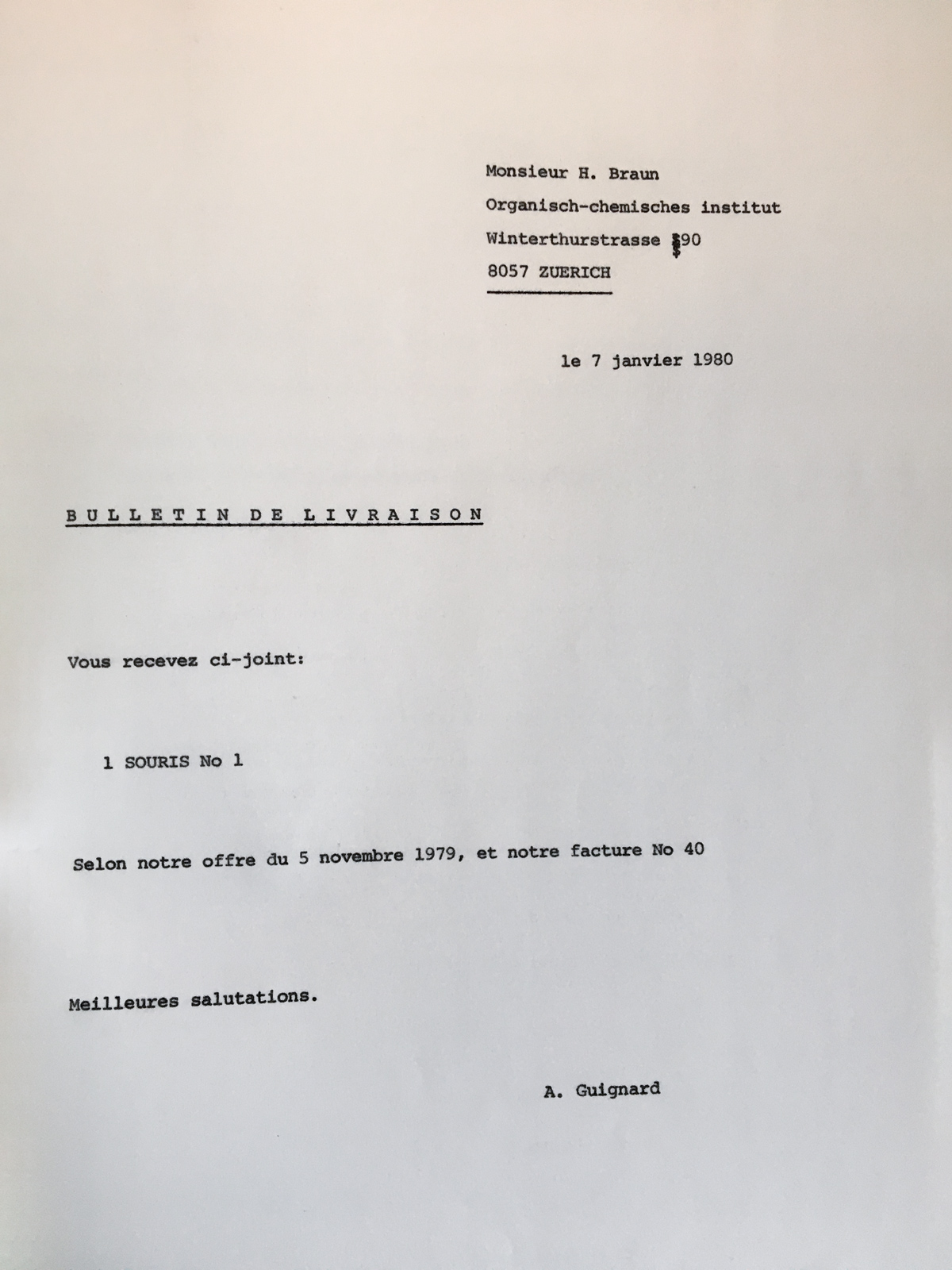
7 janvier 1980, la toute première souris sort du LAMI, destination Zurich, et son institut de chimie organique. Elle portait logiquement, le N° 1.
En 1979, Niklaus Wirth, pionnier suisse de l’informatique, professeur à l’ETHZ et père du langage Pascal, passe commande à son retour de congé sabbatique au Xerox PARC d’une trentaine de souris au total nécessaires à sa station de travail graphique Lilith, sortie en 1981. Pendant son séjour californien, le futur lauréat du prix Turing a découvert le Xerox Alto (1973), première station de travail avec une interface utilisateur graphique (GUI – Graphical User Interface), contrôlée par une souris rectangulaire à trois boutons. Percevant tout le potentiel de cette nouvelle technologie que le Xerox Palo Alto Research Parc refuse de vendre, souris comprise, Niklaus Wirth décide de développer une station de travail made in Switzerland inspirée de l’Alto. Et quoi de mieux qu’une souris pour contrôler les fenêtres, les icônes, les menus contextuels, et autres innovations affichées à l’écran; cette interface utilisateur graphique révolutionnaire qui va bien au-delà des simples lignes de caractères de l’époque, tout comme l’usage d’une souris, marquait le début d’une communication humain-machine toujours plus interactive. Niklaus Wirth rentre de la Silicon Valley avec dans ses bagages une souris esseulée offerte en guise de cadeau de départ.

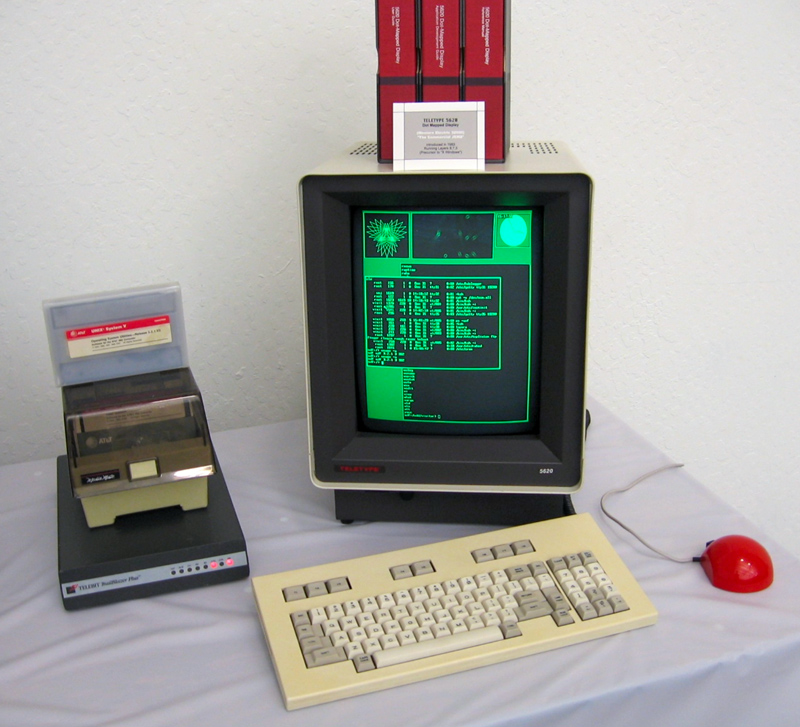
Il lui en faut d’autres. La commande qu’il passe à Jean-Daniel Nicoud donnera une impulsion essentielle au développement de la souris, contribuera à la propulser hors du laboratoire qui l’abritait, pour aboutir à un fleuron de notre industrie technologique: Logitech. Pour répondre à cette commande, André Guignard conçoit une souris mécanique à coque ronde, rouge pour les cinquante premières, que l’on voit égayer le côté de ces nouvelles machines, y compris les Smaky du LAMI!

Toutes générations confondues, ce n’est pas loin d’une centaine de souris qu’André Guignard fabriquera. En raison de l’exclusivité que le Xerox PARC souhaitait conserver sur ses périphériques, le LAMI sera entre 1980 et 1981, l’unique fournisseur de souris à la pièce, la souris hémisphérique d’André Guignard, dont bénéficieront Niklaus Wirth bien entendu, les modèles 3.06 à 3.30, et quelques souris de la génération 2, mais également d’autres centres de recherche en France, notamment l’IRIA (futur INRIA ), aux Etats-Unis, par exemple les mythiques Bell Labs, des instituts en Belgique, en Allemagne, et ailleurs s’intéressent au petit rongeur à coque ronde. Et n’oublions pas que le LAMI a aussi besoin de souris pour ses propres ordinateurs: les Smaky. L’intérêt croît, les commandes arrivent. Parfois impressionnantes, novembre 1981, 50 souris pour Lilith. Le LAMI, laboratoire de recherche, n’a toutefois pas vocation à fabriquer, et commercialiser, des souris en nombre. En 1981, il est décidé que la nouvelle souris développée par André Guignard, la souris 4, version améliorée et industrialisable de la souris 3, prendra ses quartiers en terre combière. Début 1982, la souris hémisphérique franchit l’étape significative de la fabrication industrielle, selon les plans et le know-how que son concepteur a transmis à l’entreprise horlogère de la Vallée de Joux : Dépraz SA. André Guignard n’est jamais loin, et officie en tant que conseiller.
La souris migre. Partie du Lieu, la souris Dépraz traverse officiellement l’Atlantique. A l’été 1982, la jeune société Logitech, fondée en octobre 1981 à Apples dans le canton de Vaud par Daniel Borel, Pierluigi Zappacosta et Giacomo Marini deviendra distributeur exclusif pour les États-Unis de la souris Dépraz, également dénommée P4, et non-exclusif pour le reste du monde.
De ses années d’étudiant en physique à l’EPFL, Daniel Borel connaissait Jean-Daniel Nicoud, alors chargé de cours. Dans la seconde moitié des années 1970, début des années 1980, ils travailleront en parallèle sur des projets pour la société Bobst Graphic (qui financera une partie des recherches sur la souris). Le premier sur le Beezy (BG-100), le second sur le Scrib. Pas étonnant que le jeune entrepreneur vaudois s’adresse au LAMI lorsqu’il eut besoin d’une souris dans le cadre d’un projet de système de photo-composition assistée par ordinateur développé pour le compte de la société japonaise RICOH. Quoi de mieux qu’une souris pour contrôler l’interface graphique?! A cheval entre l’Europe et le nouveau monde, en mars 1982, Logitech s’installe à Palo Alto pour se rapprocher de l’équipe de développement de RICOH, ouvrant la voie à l’émancipation et au déploiement du petit rongeur mécanique, inconsciente du changement de cap qui s’amorçait dans son activité.
Logitech a sa première souris: encodeurs optiques, bille en métal, coque ronde, trois boutons, déclinée en rouge, puis en bleu, beige, gris, orange par la suite, initialement noirs, les boutons eux aussi changent de couleur. La souris hémisphérique d’André Guignard, le maillon coloré du développement de l’interface humain-machine. En 1985, Logitech livrera le premier système de composition à RICOH. L’entreprise nippone n’y donnera pas suite. En revanche, le petit périphérique prolongeant notre corps pour aller vers l’écran, né de la passion de quelques visionnaires et de la maestria de créateurs de talent comme André Guignard portait en lui l’avenir brillant d’une société vaudoise, née dans une ferme du pied du Jura, pendant helvétique du garage états-unien.
Les souris Dépraz résistent mal aux chocs du voyage vers les Amériques, leur distribution par Logitech cessera en 1984, des souris seront conçues et fabriquées à Apples, puis ailleurs, en Asie notamment. Les coûts de fabrication sont également à prendre en considération dans l’équation. Des étapes clés jalonneront par la suite le développement et l’émergence du petit rongeur : 1984, loin des prévisions funestes de l’œuvre de George Orwell, cette année marque pour Logitech l’année du premier gros contrat OEM (Original Equipment Manufacturer), avec HP, pour la fabrication de souris, d’autres suivront ATT, Convergent Technology, Olivetti, DEC, Apple. Loin des laboratoires de ses premières années, la souris fait sa place sur le marché, puis conquiert le quotidien du grand public, pour accompagner des ordinateurs devenus micro puis personnels.
Logitech dispose en son sein des compétences d’ingénieurs de talent, souvent anciens élèves de Jean-Daniel Nicoud, au nombre desquels un certain René Sommer; celui qui dira d’André Guignard qu’il est «un mécanicien fabuleux», et avec lequel il continuera d’échanger sur la souris puisqu’il a conservé un bureau au LAMI, sera le premier à pouvoir intégrer un microcontrôleur dans une souris, technologie qui facilite la liaison aux différentes stations graphiques qui apparaissent sur le marché. Fin 1985, dotée d’une souris compétitive à son nom, la C7 Logimouse, la société lémanique s’engouffre dans ce marché naissant, et démocratisera la souris. La suite florissante de cette histoire écrite à plusieurs mains est connue, et dure aujourd’hui depuis quatre décennies. Logitech fête ses 40 ans en ce début octobre 2021.
Après la fin de la collaboration avec Logitech, la souris Dépraz continuera d’être fabriquée jusqu’en 1990, et 5000 souris sont vendues en Europe, parfois plus loin.
Voilà pour l’histoire dans l’Histoire!
Visite guidée au cœur de la souris
Plongeons maintenant avec André Guignard dans les entrailles de la souris et de l’interface humain-machine, pour comprendre un peu, en sa compagnie, les grands principes qui permettent que le mouvement d’une souris mue par notre main se traduise en déplacement d’un curseur sur un écran d’ordinateur pour nous en simplifier l’usage. Aujourd’hui évidente, cette possibilité d’interaction avec la machine est épatante, et révolutionnaire.
Visite guidée 1: Des potentiomètres aux encodeurs optiques
Avant l’arrivée d’André Guignard au LCD en 1976, Jean-Daniel Nicoud avait apporté une transformation significative à la souris originale de Douglas Engelbart en remplaçant les potentiomètres par des encodeurs optiques (capteurs incrémentaux). De quoi s’agit-il? «L’encodeur c’est la roue optique, le terme exact est capteur incrémental, une roue avec des rainures, ou des pas, que l’on va compter avec des capteurs infrarouges. C’est un principe qui était connu depuis longtemps».
Visite guidée 2: La mesure du mouvement
André Guignard schématise dans les très grandes lignes en quoi consiste ce principe de la mesure du mouvement de la souris mue par la main humaine sur une surface pour un pointage sur une écran d’ordinateur: «On transforme le déplacement de la bille (initialement deux roues) en deux axes orthogonaux, on transforme le mouvement en coordonnées orthogonales. On compte les nombres de passage du disque codeur (capteur incrémental) qui donne une idée précise du déplacement dans un axe et dans l’autre, sur un plan. Le calcul de ce déplacement est ensuite transféré à l’écran pour le pointage. Au début le curseur est placé n’importe où, généralement au centre pour qu’on le voie, et ensuite quand vous déplacez la souris, le disque codeur compte le déplacement, il reconstitue le déplacement de la bille simplement en reportant les coordonnées qu’il obtient des deux axes de rotation».
Visite guidée 3: Des roues à la bille en métal
Mais qu’est-ce qui fait tourner les deux capteurs incrémentaux?
La souris originale d’Engelbart a des roues pour les axes de rotation, de même que la première souris modifiée par Jean-Daniel Nicoud avant l’arrivée d’André Guignard au LCD.

La souris hémisphérique a une bille en métal en lieu et place des roues. André Guignard explique l’apport de cette modification:
«Effectivement, dans la première souris de Douglas Engelbart, puis dans celle de Jean-Daniel Nicoud, les axes de rotation étaient des roues, mais les roues ça ne va pas bien, on ne peut pas les déplacer correctement». De plus, contrairement aux roues, la bille permet de déplacer le curseur dans toutes les directions. Les roues seront remplacées par une sphère unique faite d’un matériau qui évoluera dans l’histoire de la souris mécanique: plastique, métal, caoutchouc. «Il y avait déjà aux USA une personne qui avait fait une souris avec une bille. Mais je ne l’avais jamais vue. L’idée d’utiliser une bille existait déjà, par contre d’où venait-elle? C’est comme toutes les inventions, on dit qu’on a inventé mais on n’a rien inventé».
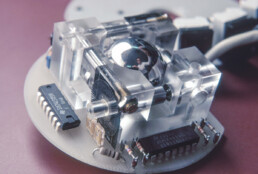
Les roues ont d’abord été remplacées par une balle de ping-pong. «La balle avait l’intérêt de ne pas avoir de points durs et de rotation. Elle tourne. Mais la balle de ping-pong glissait au lieu de rouler. D’où l’idée de prendre une bille lourde, en acier, une bille de roulement à bille de locomotive. Malgré cela, il y avait quand même un effet de glissement sur les galets qui appuient sur la bille, il y avait forcément une légère perte. Il fallait donc résoudre le problème de la position des galets par rapport à la bille. Les galets, c’est ce qui transmet l’information, ils entraînent les encodeurs optiques (capteurs incrémentaux). Il fallait donc être un petit peu au-dessus de l’équateur mais pas trop, et comme il n’y avait que deux galets, il a fallu appuyer derrière autrement car la bille ne les touchait plus. L’information du mouvement n’était plus transmise, elle était perdue. J’ai donc intégré dans la souris hémisphérique un troisième galet qui appuie sur la bille pour la maintenir en place».
Que des modifications mineures, il faudra encore quelques années avant que la souris ne subisse de grandes évolutions: «Lorsque Logitech a repris la conception et la fabrication en série de souris, spécialement aidée par René Sommer, la souris a été modifiée. Au début il y a eu des modifications mineures: la bille en acier remplacée par une bille en caoutchouc, les appuis de la bille ont été légèrement modifiés, mais le principe était toujours des capteurs optiques avec des disques codeurs, c’était toujours la même chose».
Visite guidée 4: Secrets de fabrication de la souris hémisphérique
Comptez entre 10 et 14 heures pour fabriquer une souris; cela dépend du modèle. Pendant une année environ, André Guignard leur a consacré tout son temps, au LAMI, il ne faisait que cela, des souris. La conception, et la production s’effectuaient en parallèle, les améliorations nécessaires apportées au fur et à mesure. Les 50 premières souris hémisphériques sorties du LAMI, en revanche, étaient toutes identiques, à coque rouge. Avant d’arriver à ce résultat, plusieurs prototypes, aujourd’hui disparus, se sont succédés.
Et la coque? En 1979-1980, pas d’imprimante 3D! Il fallait utiliser les techniques à disposition pour obtenir une forme précise. André Guignard, qui sait fabriquer les outils dont il a besoin crée le moule nécessaire pour la coque.


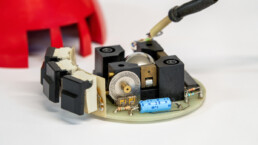
«Les cinquante premières souris que j’ai fabriquées étaient usinées dans un bloc de plexiglas (transparent). Les capteurs optiques étaient faits avec des films photo, produits par l’atelier de circuits imprimés de l’EPFL. J’ai fabriqué les boîtiers dans un moule de coulage puis les ai usinés pour faire les deux plats sur le côté et les dégagements pour les 3 interrupteurs. La matière de coulage est de la résine époxy colorée (Araldit). Par la suite, la maison Dépraz a copié exactement le design, mais a fait fabriquer un moule d’injection pour le boîtier et le bloc intérieur. Matière: ABS». ABS, Acrylonitrile Butadiène Styrène, ou plus simplement, la matière des LEGO! «Les capteurs étaient fabriqués par usinage chimique dans de la tôle d’acier inox».
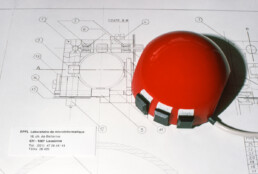
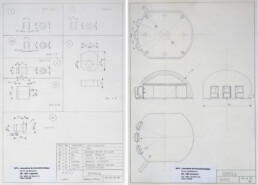
Pourquoi cette forme hémisphérique? Tout simplement, parce ce que: «Je trouvais ça marrant!» répond espièglement l’inventeur. «Il faut croire que ce n’était pas si mal puisque tout de suite elles ont été copiées» précise-t-il en montrant une copie conforme. «Un produit copié est un produit qui a de l’intérêt, c’est un signe que ça vaut la peine d’insister». Une première fournée de cinquante souris rouges, il en a refait d’autres par la suite, mais produire en série telle n’était pas la vocation du LAMI. 1981, la fabrication en plus grand nombre a été sous-traitée à la société Dépraz, conformément aux plans remis par André Guignard. Des plans établis à la main. «A l’époque on ne faisait pas des plans sur l’ordinateur comme maintenant, c’était sur papier, sur une planche à dessin, avec le T et un crayon. Une fois les plans dessinés, j’ai fait les pièces à la fraiseuse, au tour, je les ai montées puis essayées. Et voilà! J’ai aussi dessiné, monté, essayé le circuit imprimé qui allait dans la souris». Le circuit imprimé, pour permettre la communication avec l’ordinateur, la machine. «Au début c’était très primitif, c’était une sortie qu’on appelle parallèle. On sortait directement les données provenant des capteurs et l’ordinateur traitait tout cela. Plus tard un microcontrôleur a été intégré par René Sommer à l’intérieur de la souris, ce qui a permis la transmission d’informations beaucoup plus évoluées entre la souris et l’ordinateur; c’est une évolution importante dans l’histoire de la souris». Si la souris est à ce moment devenue «intelligente», elle avait encore une bille, elle était encore partiellement mécanique.

Étape subséquente importante dans l’évolution du rongeur intégrant les nouvelles technologies, lorsqu’elle deviendra électronique, optique, à l’instar de ma souris sur le ventre de laquelle les mots «optical mouse» sont inscrits. Cette transformation résulte de la suppression de la mécanique. «La souris est devenue optique lorsqu’il n’y a plus eu de bille, plus de mécanique, il n’y plus rien qui tourne, c’est une caméra qui filme le support. Quand on la déplace elle s’aperçoit que la photo qu’elle vient de prendre s’est décalée d’un petit bout. Des photos, oui c’est une caméra!» clarifie André Guignard.
Pas d’effervescence, pas de grandes émotions lorsque la première souris a fonctionné, qu’André Guignard a vu le mouvement du curseur à l’écran, correspondant au déplacement de la souris mue par sa main. «C’était assez évident. La technologie était tout à fait primitive. On donne des impulsions, ça on pouvait le faire de n’importe quelle manière. Personne n’a sauté de joie en disant «Ça marche!». C’était une évidence que ça allait marcher. Le problème était de savoir combien on perdait de pas quand on se déplaçait. On avait fait un petit cadre en plastique où on déplaçait la souris quatre fois et théoriquement elle devait se retrouver après quatre voyages au même endroit. Et bien jamais, jamais au même endroit. A cause du glissement. C’était ça qui était le challenge, de limiter le plus possible ce glissement, d’où l’utilisation ensuite de billes en caoutchouc qui a une meilleure adhérence. On a aussi essayé de les faire mates, dépolies, pour qu’elles glissent un peu moins».
André Guignard, modeste ajoute: «Une souris, au niveau inventif c’est assez faible; ce n’est pas l’invention du gramophone! Le trait de génie était de convaincre les gens de changer leur pratique». André Guignard, un inventeur trop modeste. «C’était une évidence que ça allait marcher». C’était évident… Il fallait quand même la faire, la souris hémisphérique! Je suis vraiment admirative, de ce que les humains sont capables de concevoir, puis de réaliser, de leur ingéniosité, un périphérique d’entrée, fruit de découvertes, de trouvailles, d’astuces apparues au fil du temps, et finalement jointes dans cette demi-sphère colorée avec ses trois boutons pour contrôler un ordinateur, nous permettre à nous humains de communiquer plus aisément avec une machine qui ne comprend que des suites de 0 et de 1, sans avoir besoin d’être les rois ou les reines du code.
Un changement de pratique: «Maintenant on n’imagine pas du tout un ordinateur sans souris. A l’époque on n’imaginait pas du tout un ordinateur avec une souris».
«Au début nous avons vendu les 50 souris que j’ai fabriquées un petit peu partout dans les universités; c’était l’idée de Jean-Daniel Nicoud qui était assez géniale! Distribuer les souris, à perte pratiquement, car il n’était pas question de gagner de l’argent avec ça. L’idée de génie a été d’aller dire: «Utilisez ce périphérique!», alors que personne ne savait ce que c’était. Avant la souris, pour se déplacer sur les écrans on utilisait des tables graphiques, des petits panneaux avec un stylo qu’on déplaçait dessus». Il y avait aussi les flèches du clavier, que plus tard Steve Jobs fera supprimer pour qu’on utilise uniquement une souris avec le Macintosh (1984). Et Jean-Daniel Nicoud a dit: «On peut faire ça avec une souris!». L’idée de génie selon André Guignard a été celle de Jean-Daniel Nicoud, puis de Daniel Borel, «d’aller distribuer la souris pour mettre dans l’esprit des gens, qu’il fallait absolument mettre une souris avec un ordinateur, chaque ordinateur avec sa souris, c’est ça qui est génial! Dans mon esprit, c’est Daniel Borel qui est allé dire: «Il faut mettre une souris avec chaque ordinateur!». Il a su convaincre les développeurs et fabricants d’ordinateurs, qui n’étaient pas du tout convaincus au départ; cela a pris du temps, mais il a vraiment fait démarrer la commercialisation de la souris». Et André Guignard de conclure concernant cette partie de l’histoire de l’interface humain-machine qu’il a contribuée à écrire: «Il est quasiment impossible de recréer historiquement ce qui s’est passé. C’est une espèce de mouvance. Ce qui à mon avis il faut retenir, c’est que des gens comme Jean-Daniel Nicoud et Daniel Borel arrivent à convaincre les fabricants qu’il fallait mettre une souris avec chaque ordinateur; c’était ça le grand pas!». Il a aussi fallu prendre des risques: «Ce n’était pas donné, le concept et l’idée de gagner de l’argent avec des souris, ce n’était pas évident du tout, pour preuve au départ Dépraz a été la seule entreprise à accepter de faire des souris. Il y a eu plusieurs demandes ailleurs. Refusées».
Quelques mots d’Amérique: «Je ne sais pas si je dois vous maudire ou vous félicitez d’avoir fabriqué ces souris».
Effectivement, la souris a pris les commandes du navire Logitech, l’a fait dévier de son cap initial, plutôt orienté soft que hard, mais quatre décennies plus tard, parfois poussé par des vents cléments mais ayant aussi traversé ses quarantièmes rugissants, en réponse à ces mots adressés à André Guignard par Daniel Borel sur une carte postale venue des Etats-Unis, la réponse de celui dont le voilier s’appelle…Mousetrap! Souricière! transparait de cette déclaration faite récemment au quotidien Le Temps: «Lors du 40e anniversaire de Logitech le 2 octobre prochain, mon voilier Mousetrap sera dans la baie de San Francisco pour une grande célébration, comme vous pouvez l’imaginer! »
La souris, une histoire collective écrite à plusieurs mains, à n’en pas douter!
La souris, ce n’est pas tout!
Smaky, logidules et robotique
Les activités et inventions d’André Guignard pendant ces années passées à l’EPFL ne sauraient être réduites à la souris, ni même à la micromécanique. Il a également mis son vaste savoir-faire au service de la micro-informatique naissante accomplissant avec le soin et la minutie constituant sa marque de fabrique, moultes réalisations, par exemple, monter plusieurs Smaky 4, 20 unités fabriquées en tout. Pliage de plaques de PVC, montage des pièces dans les boîtiers, montage des écrans, «à l’époque on adaptait les écrans nous-mêmes, après on les a achetés tout faits». Il a effectué le câblage en wrapping à la main, sur place; cela changera dès le Smaky 6 (1978).
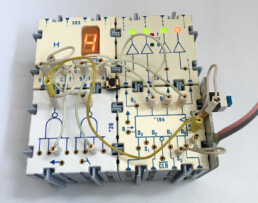
Il a ensuite fallu fabriquer des supports pour tenir les écrans pour les salles de cours, et bien sûr il a consacré beaucoup de temps aux fameux logidules. Ces petits cubes électroniques développés il y a 50 ans par Jean-Daniel Nicoud (pour la première génération, la deuxième est estampillée 2021), afin d’aider des générations d’étudiants à comprendre les concepts et les solutions technologiques à la base de l’informatique, ont aussi beaucoup occupé André Guignard qui en a fabriqué des centaines à la main. Les boîtiers étaient moulés, les couvercles faits à la main avec des gabarits pour le perçage. L’impression pour les couvercles était faite en sérigraphie, et bien sûr il y avait les circuits-imprimés, et les inévitables réparations: «avec mon collègue Georges Vauchez, on montait les circuits-imprimés, on les testait. Il fallait aussi les réparer. Nous avions toujours un paquet de Logidules à réparer».

L’habile horloger-ingénieur a dessiné, sur des supports évoluant au gré des nouvelles technologies, de nombreux circuits imprimés, pour des projets d’étudiants avec lesquels il travaillait beaucoup, pour la souris bien sûr mais également pour le robot Khepera, et d’autres projets encore. «Au début on collait des bandes noires sur des transparents. Ensuite, dans les années 80, on a eu un logiciel sur un PDP 11, un mini-ordinateur payé à l’époque plus de 100’000 francs; c’étaient les premiers logiciels pour dessiner des circuits imprimés sur ordinateur. Les premiers circuits imprimés je les dessinais sur une carte graphique, pas avec la souris».
Peu à peu André Guignard commence à travailler en robotique, domaine que Jean-Daniel Nicoud a toujours aimé, et dans lequel il entraîne toujours plus les collaborateurs de son laboratoire, et des étudiants passionnés, organisant même des concours. Et bien sûr André Guignard a mis son talent et son ingéniosité au service de la réalisation de ces robots, simples au début, puis de plus en plus complexes. Tout petits, ou plus grands. Des robots qui suivaient les nouvelles possibilités offertes par l’évolution de la technologie. André Guignard me montre un robot d’1cm3, Jemmy, entièrement réalisé au LAMI (1992), et primé dans sa catégorie lors du International Microrobot Maze Contest ’97 à Nagoya au Japon. «C’était un étudiant qui est allé au Japon pour le concours et a gagné le premier prix». Le robot devait pouvoir se déplacer dans un labyrinthe simple de 1,5cm de côté, mais pas à plat, ça aurait été trop simple, il devait pouvoir monter et descendre. Il y a deux moteurs dedans, des capteurs de distance pour se déplacer sans toucher les bords du labyrinthe. Et les roues, tellement fines! Un travail d’horloger! «Oui, oui, ce sont des roues d’horlogerie, Là c’est vraiment de l’horlogerie». Bon exemple, de ce que les compétences d’André Guignard pouvaient apporter dans cet environnement, ce minuscule robot brise les représentations de robots forcément grands. Un robot peut être tout petit. Il y a également eu Inchy, le bien nommé, mesurant un inch cube, soit 2,54cm3. «Donc beaucoup plus gros en volume!» souligne André Guignard. Dans mon référentiel, cela demeure très petit, mais je ne suis pas horlogère de formation. Cette différence de perception propre à chacun selon son parcours est fascinante.

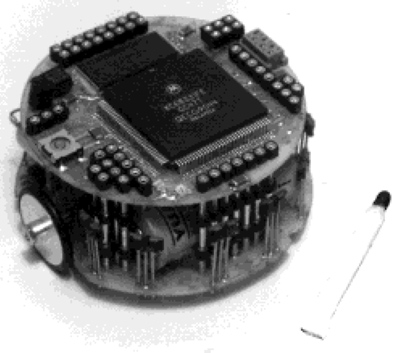
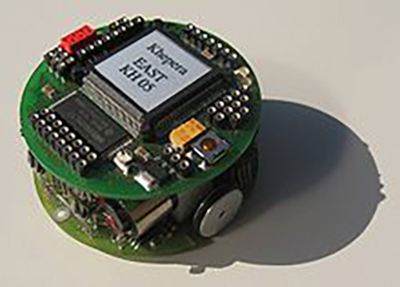
Commencé comme projet d’étudiant, puis développé au LAMI depuis 1991, Khepera, robot mobile de 5,5 cm de diamètre, qui doit son nom à un dieu égyptien à tête de scarabée, plus attractif que sa dénomination première : cafard, sera suivi d’autres robots: Koala, Kameleon, Kilobot dont les nouvelles générations sont toujours utilisées aujourd’hui dans l’enseignement et la recherche avancés. Sa vocation d’origine de fournir les meilleurs outils robotiques pour les chercheurs et les professeurs, dévoilée dans The Development of Khepera, demeure actuelle. En revanche, l’objectifs initial de produire dix robots destinés à être utilisés dans le cadre du seul LAMI, a quant à lui été largement dépassé! Khepera et ses compagnons ont conquis le monde: «K-Team Solutions have been successfully deployed in over 600 universities and industrial research centers in the world» lit-on sur le site de la société K-Team Corporation installée à Vallorbe qui a repris en juin 1995 le flambeau de la production et de commercialisation de ce petit robot qui avait suscité de par le monde un intérêt inattendu. Il fallait une structure suffisante pour répondre à la demande toujours croissante, et à l’instar de la souris hémisphérique, tel n’était pas le destin du LAMI et de ses partenaires.


Dans la réalisation de cette invention pionnière qui a contribué à l’émergence de la robotique évolutive, mêlant mécanique, capteurs en tout genre et intelligence artificielle, André Guignard avait la charge de la mécanique, du dessin des circuits électroniques, du prototypage, des montages, des tests. «Il y avait du boulot!». On le croit volontiers. «Au début, le Khepera a beaucoup été utilisé pour des projets d’étudiants, et pour l’étude de robotique multiple, c’est-à-dire plusieurs robots associés pour l’accomplissement d’une tâche. Comme les S-bots. L’idée des S-Bots (pour Swarm Bots, Bots en essaim) est partie de là, à la différence que les S-Bots sont beaucoup plus sophistiqués que les Khepera». Dans le S-Bots, projet européen (2001-2005), chaque partie est indépendante mais ensemble elles montrent leur force, s’adaptent à leur environnement en surmontant un obstacle, par exemple. En 2006, le magazine Wired classe les S-Bot dans la liste The 50 Best Robots Ever, robots de fiction ou réalité.
Dans la longue liste des robots construits par André Guignard, pour des laboratoires ou dans le cadre de projets d’étudiants, de doctorants (robots sauteurs, volants), figure la poupée Robota (1997). Robot éducatif et thérapeutique, cette poupée aux bras et à la tête rendus mobiles par André Guignard, capable d’interactions complexes, était destinée à aider les enfants autistes dans l’apprentissage de la communication interpersonnelle.
Robota dont les yeux bougeront dès 2005, en raison de ses traits humains fait figure d’exception dans l’éventail des créations d’André Guignard. On trouve dans cette galerie d’avantage de robots qui empruntent des caractéristiques pour certaines propres au monde animal: voler, ramper, des amphibiens (ont des pattes), bondir, etc. Les chercheurs trouvent-ils leur inspiration dans le monde animal? «Les robots bio-inspirés, c’est autre chose. Khepera avait été nommée ainsi car il ressemble un peu à un scarabée, mais ce n’était pas encore l’idée du bio-inspiré comme il est développé à l’EPFL au Biorobotics Laboratory (BioRob) dirigé par le professeur Auke Jan Ijspeert. Un exemple sur lequel j’ai travaillé est la Salamandre, ainsi qu’un robot sur lequel je travaille actuellement: AmpiBot».

André Guignard, bien qu’officiellement retraité depuis 2007 est, un jour par semaine, hôte de l’EPFL et poursuit la réalisation de projets, AmpiBot notamment. «Ces robots sont la suite de la Salamandre. Ils seront utilisés pour faire de la recherche dans l’eau. Ce ne sont pas des amphibiens, mais des nageurs, car il n’a pas de pattes pour aller sur terre comme c’était le cas de la Salamandre. D’aspect proche d’une lamproie, il sera un peu plus grand et surtout beaucoup plus puissant que la Salamandre. Il ira beaucoup plus vite, et permettra l’exploration dans des endroits difficiles d’accès, mais surtout il permettra d’aller voir dans des lacs ce qui s’y passe sans trop modifier l’environnement, puisqu’il se comporte comme un poisson; cela minimise la pollution, permet de ne pas gêner l’écosystème et surtout de mesurer les valeurs réelles. Un robot qui a des hélices modifie la turbidité de l’eau, et on ne peut plus rien mesurer car vous ne savez pas comment c’était avant son arrivée». AmphiBot est entièrement créé par André Guignard, qui toutefois ne part pas de zéro, on reconnaît la forme de la Salamandre dont il est une amélioration qui logera un moteur plus puissant, une électronique plus évoluée, et puisque cela implique un changement de la dimension du robot, André Guignard doit redesigner l’ensemble, l’adapter pour la fabrication sur une imprimante 3D. Composé de plusieurs éléments à assembler, chacun équipé de deux batteries et de son propre microprocesseur, AmpiBot sera autonome. Et, retour à la passion de jeunesse de l’astucieux inventeur: «On communiquera avec lui par radio, ou par wifi si on est proche». Le principal défi du projet: «Les problèmes sont essentiellement des problèmes mécaniques, l’étanchéité car il faut que tout cela ne prenne pas l’eau. Après l’impression 3D, les éléments sont recouverts d’araldite, autrement ce n’est pas étanche». Secret d’artisan!

A nouveau le mouvement, mais avant tout: «Ce qui est important c’est d’explorer, et puis de comprendre».
Avec passion, comme il m’a expliqué quelques principes à la base de la transposition du mouvement de la souris mue par une main humaine sur un écran d’ordinateur, il me parle du mouvement et des robots: «Pour les robots mécaniques généralement, on utilise essentiellement les roues, car c’est ce qui est le plus simple à faire mécaniquement, et qu’on ne peut pas faire biologiquement. Il n’y pas de roues biologiques. C’est l’Homme qui a inventé la roue; et cela marche suffisamment bien pour qu’il l’ait utilisée dans tous les domaines. Actuellement on va plus loin. L’évolution a amené les poissons, qui nagent fabuleusement bien, un requin qui se déplace, c’est fabuleux, il bouge à peine, j’en ai vu lors de plongées, ou une raie manta qui fend l’eau avec grâce, c’est incroyable! L’idée est d’aller vers ce genre de mouvement. Il y a des laboratoires spécialisés dans ce domaine. D’ailleurs, la Salamandre a fait l’objet d’un article dans la prestigieuse revue Nature. J’ai même fait avec elle le voyage de Los Angeles, pour une présentation. Ce qui était intéressant, et que l’équipe en charge du projet a étudié, c’est le mouvement dans l’eau, ils l’ont analysé par petits bouts pour essayer de le reproduire. Et on y arrive très bien car ce sont des fonctions sinusoïdales décalées. Le fait de se rendre compte comment cela fonctionne et d’arriver à l’imiter est extrêmement intéressant. Les applications… Dans une université, vous cherchez partout, les applications viennent sans qu’on s’en rende compte et puis peut-être que ce sera plus tard, ou jamais mais ce n’est pas cela qui est important. Ce qui est important c’est d’explorer, et puis de comprendre. Avec la Salamandre et Amphibot, en plus on essaie d’imiter. Imiter, c’est une autre démarche. Mais essayer de comprendre et d’expliquer, c’est déjà une démarche».
Un inventeur émerveillé du cerveau humain et bien ancré dans la réalité
«La mécanique et l’électronique réelles, c’est ça qui est intéressant! La simulation n’est pas la réalité». André Guignard se réjouit qu’à l’EPFL, demeurent «pas mal de gens qui font du «hard», qui font de la mécanique et de l’électronique réelles. Maintenant avec la puissance des ordinateurs vous pouvez tout simuler. Le problème toutefois, c’est que les simulations marchent toujours. Et si tel n’est pas le cas, on les fait fonctionner. Au contraire, lorsque vous réalisez des objets mécaniquement, électriquement, électroniquement, tout à coup ça ne marche plus. Il faut alors comprendre pourquoi, adapter, améliorer sa technique. Et c’est ça qui est intéressant. De nos jours, nous sommes de plus en plus dans l’«idéel», mais il faut quand même marcher, manger, il faut vivre. Il ne faut pas oublier qu’on reste sur Terre, on a un peu tendance à l’oublier malheureusement. On devient de plus en plus, pas intellectuels, mais «simulés», on simule de plus en plus. On sort de la réalité pour en avoir un concept simulé. Mais la simulation n’est pas la réalité. Par exemple, concevoir et réaliser une pièce mécanique ce n’est pas si facile que ça. Il y a des choses qui fonctionnent, d’autre pas. Il y a toujours plus de logiciels qui simulent des comportements mécaniques, mais ce n’est que de la simulation, ce n’est pas réel. A la fin il faut bien fabriquer la pièce. Or, on peut concevoir quelque chose de magnifique mais impossible à réaliser, soit parce qu’aucune machine ne peut le faire, soit parce que cela coûterait beaucoup trop cher. Donc il faut chercher et ça, ce n’est qu’avec la pratique, l’usage, l’expérience, le maniement du tour qu’on peut y arriver. L’intelligence artificielle, c’est la même chose. Vous pouvez simuler un comportement, ou tout ce que vous voulez, mais ce n’est pas la réalité. Tôt ou tard, cette intelligence artificielle, si intelligente soit elle, va se casser la figure. Elle est programmée pour faire un certain nombre de tâches, qui peut être très grand, mais elle va finir par tomber, comme nous êtres humains, sur un os. Mais nous, êtres humains, nous ne sommes pas programmés. L’os nous le verrons venir, non pas par prémonition, mais par habitude de comportement dans la vie. L’IA non. Elle ne fait que répéter, elle apprendra une fois qu’elle se sera cassé la figure. Elle ne verra pas venir le problème, et aura toujours du retard par rapport à la vraie intelligence». Voir venir, anticiper, comment faire pour régler un problème. André Guignard, l’expert en micromécanique aux doigts en or qui a passé tant d’heures à créer, partage son admiration pour le cerveau humain, sa mémoire qui parfois le trahit, la capacité d’inventer, et s’interroge sur son origine: «Le cerveau est quelque chose d’incroyable. Avec l’âge je commence à oublier un peu les mots. C’est normal. Je cherche à me souvenir d’un nom. Je ne le trouve pas. Si j’insiste lourdement ça ne marche pas. Si je n’y pense plus, je suis à peu près certain qu’une heure après ou le lendemain, paf!, le mot revient. Cela veut dire qu’il est là mais que je n’y ai plus tellement accès ; ça c’est une première chose. Deuxièmement, en ce qui concerne les inventions, vous avez une idée, pour un écrit, un robot, un robot c’est un ensemble d’idées, un mécanisme, et tout d’un coup il est là. Il est sorti d’où? Nul ne le sait. Ce n’est pas du hasard, parce que si c’était le fruit hasard, l’intelligence artificielle pourrait le faire aussi». André Guignard émet une hypothèse: «Il y a probablement quelque chose qui est lié à l’inné, mais aussi à l’acquis de votre vie entière, et de celle de vos ancêtres. Il faut lire Jung pour ça, avec ses archétypes». Quand André Guignard n’est pas à l’EPFL, il lit, beaucoup, s’intéresse à la psychologie, a lu nombre d’ouvrages dans ce domaine, ceux de l’éminent psychiatre suisse Carl Gustav Jung, mais n’est pas acquis aux théories freudiennes. «Ces combinaisons incroyables font que, tout d’un coup, un concept surgit. L’intelligence artificielle, en revanche, ce n’est qu’un outil! Les robots deviennent toujours plus intelligents. C’est une forme d’intelligence, certes, mais on a de la peine à la définir. Qu’est-ce que l’intelligence? Est-ce le fait de savoir se comporter par rapport à un évènement? C’est une forme d’intelligence, mais ce n’est pas suffisant. Si j’invente quelque chose, ce qui m’est arrivé de temps en temps, ça c’est une forme d’intelligence. Mais je suis absolument incapable de dire d’où elle vient». Le mystère demeure.
Monsieur Guignard, de toutes vos inventions, laquelle vous a le plus touché? «La seule chose dont je suis très fier c’est d’avoir réussi à fabriquer une montre qui fonctionne. En tant qu’apprenti. J’avais 16 ans. A l’époque je ne trouvais pas cela génial. Je ne sais pas comment cette montre a réussi à survivre à mes années d’adolescence» questionne-t-il amusé. Au début, rien, puis à la fin, une montre. Un garde-temps. «Là il y a une forme de création qui peut être un peu primitive. C’est cela que je trouve le plus extraordinaire dans le domaine de ma création, car la souris, comme je vous le disais, c’est des applications de choses existantes. Une bille qui roule sur un tapis c’est de la cinématique primitive. Il n’y a pas de quoi en faire un fromage!» L’expression sort spontanément. Idéale. Souris, fromage. Nous rions. «La montre a quelque chose de particulier, quelque chose qui bat à la fréquence proche du cœur». Le rythme de la vie. «La mesure du temps, philosophiquement, est difficile à vivre, est lourde à vivre psychologiquement. Et plus on avance, et plus les temps passe vite. Ce n’est pas un mythe, je vous assure».
Transmettre tout en restant actif
Retraité actif depuis 2007, et éternellement curieux, quand André Guignard ne donne pas corps à AmphiBot, ou ne lit pas, différentes missions pour des laboratoires de l’EPFL, des entreprises externes, des starts-ups, Flybotix spécialisée dans les drones d’intérieur, par exemple, occupent l’ingénieux combier dont l’habileté et l’expertise font plier les éléments: terre, eau, air. L’air aussi. Et micro, bien sûr. 2007, premier vol de MC2, un micro-robot-volant de 10 grammes qui vole de manière autonome dans une arène de test de 7x6m. C’était un projet d’étudiant, il y en a d’autres volants et sautants, mais pas seulement, car André Guignard a à cœur de partager et transmettre son immense savoir. Pendant notre entrevue, le téléphone sonne, une personne qui a besoin d’un renseignement sur un vieux composant. «C’est ça qui est formidable ici, je connais un tas de monde et je continue à suivre l’évolution d’un tas de chose, et puis il y a pas mal de gens qui viennent me poser des questions». Là se niche sa motivation: la passion de faire des choses comme celles qu’il fait et l’envie de rester dans un contexte où la recherche continue, «le contact avec des personnes dans le coup ». Voir ce qui se passe, interagir, se maintenir au courant. Et transmettre, à des étudiants spécialement. «Il y en a un qui viendra à 14 heures pour une pièce mécanique » se réjouit-il. Non loin de son laboratoire, un bâtiment sort de terre. L’EPFL est en train de mettre en place un centre de compétence pour la mécanique, à trois niveaux : étudiants, intermédiaire avec assistance de professionnels pour l’usage de certaines machines, et professionnels exclusivement. On vient lui demander des conseils. «Quelles machines pour équiper ce nouveau centre de mécanique?». Là aussi, existe une forme de transmission qui lui plaît, pour l’acquisition de compétences, de savoir-faire, d’expertise concrètes et tangibles, non simulées. Monsieur Guignard, pour conclure, que diriez-vous à un ou une jeune d’aujourd’hui qui s’intéresse à la science, à la mécanique? «Si vous avez envie de faire quelque chose, faite-le, même si vous vous casser la figure, faites-le, recommencer jusqu’à ce que ça marche. Faire, il faut faire!». Avec l’outil adéquat, bien sûr!
Parfois, dans les journées d’André Guignard, la mécanique et la musique se rejoignent. L’inventeur mélomane a récupéré un vieux phonographe à rouleau et œuvre à le remettre en route. Il me le montre, ça grésille un peu mais ça fonctionne. La musique si chère à André Guignard emplit la pièce. Echo d’un autre temps, qui a traversé les décennies, gravé sur un rouleau acquis récemment sur Ebay pour une dizaine d’euros. Et lorsqu’il a la tête trop pleine, André Guignard fait des mots-croisés «mais sans les cases noires, niveau 4, cela me permet de faire fonctionner ma mémoire, et puis surtout je ne pense à strictement rien d’autre, pour se sortir c’est génial». Sans les cases? «Il y a les définitions par ligne, la grille 20×30, mais pas une case noire» précise-t-il en riant, en réponse à mon regard étonné.

Au moment où vous lisez ce portrait, qu’avez-vous sous la paume de la main?
Merci Monsieur Guignard d’avoir généreusement partagé un peu de votre vaste et fin savoir, quelques-unes de vos réalisations et un peu de votre vision du monde.
Références, et pour aller plus loin
Eugène Aisberg, La radio?… mais c’est très simple!, ETSF, 29e édition – 10/1998
Anne-Sylvie Weinmann, Une vie d’inventions. Jean-Daniel Nicoud, un des pères de la micro-informatique suisse – 23/04/2021
Anne-Sylvie Weinmann, Le microprocesseur Intel 4004, 50 ans déjà! – 10/05/2021
Jean-Daniel Nicoud – 50e EPFL – Interview de Jean-Daniel Nicoud par Jérôme Genet pour le Musée Bolo – 11/2019 (Les souris: 22:05)
Histoire de la souris, Smaky.ch
Une histoire de l’informatique en Suisse, Smaky.ch
The Mother of All Demos, Douglas Engelbart – 12/1968
Niklaus Wirth, The personal computer Lilith, ETHZ – 04/1981
Lilith Workstation, ETHZ – 04/2005
Schweizer Computer (der Dieser Modula Computer (Lilith), l’ordinateur, sa souris, interview de Niklaus Wirth), Emission Karussell (suisse-allemand) – 09/1983
Bobst Graphic, 1972-1981, Edité par Giliane Cachin avec un essai de François Rappo, Triest Verlag für Achitektur, Design and Typographie, Zurich, ECAL, 2019
Logitech History – 03/2007
Yannick Rochat, L’histoire du Nimmer, l’un des premiers jeux électroniques conçus en Suisse (1968), en particulier «Logitech lui doit tout» – 11/07/2020
Anouch Seydtaghia, Daniel Borel: «Est-ce que le Conseil fédéral comprend vraiment les enjeux du numérique?», Le Temps – 09/07/2021
Walter Isaacson, Steve Jobs, JC Lattès, 2011
Microrobots, Miniature Robots and Subsystems Group, Archives du Laboratoire de Microinformatique (LAMI, EPFL) – 12/1997
Document texte-photos: LAMI, Labo de Microinformatique EPFL, Professeur Jean-Daniel Nicoud
Francesco Mondada, Edo Franzi, André Guignard, The Development of Khepera – 1999
Adrià Budry Carbó, Servan Peca, La Suisse championne du monde de la robotique, Le Temps – 31/10/2017
Francesco Mondada, Giovanni C. Pettinaro, André Guignard, Ivo W. Kee, Dario Floreano, Jean-Louis Deneubourg, Stefano Nolfi, Luca Maria Gambardella, Marco Dorigo, Swarm-Bot : A new Distributed Robotic Concept, Autonomous Robots, Volume 17, septembre-novembre 2004, pp. 193-221
Robert Capps, The 50 Best Robots Ever, Wired – 2006/01/01
Florent Guenter, Lorenzo Roos, André Guignard, Aude G. Billard, Design of a Biomimetic Upper Body for the Humanoid Robot Robota – 2005
Emma Marris, Robo-salamander goes swinning, Nature, avec une vidéo de la Salamandre – 08/03/2007
Bioinspired Vision-based Microflyers: Taking inspiration from biological systems to enhance navigational autonomy of robots flying in confined or cluttered environments